業種を問わないインフラ維持管理の
ソリューションをご提供します




インフラ設備の点検・維持管理の
「今」に変革を起こす

ロボティクスで実現する
安全で持続可能な世界へ
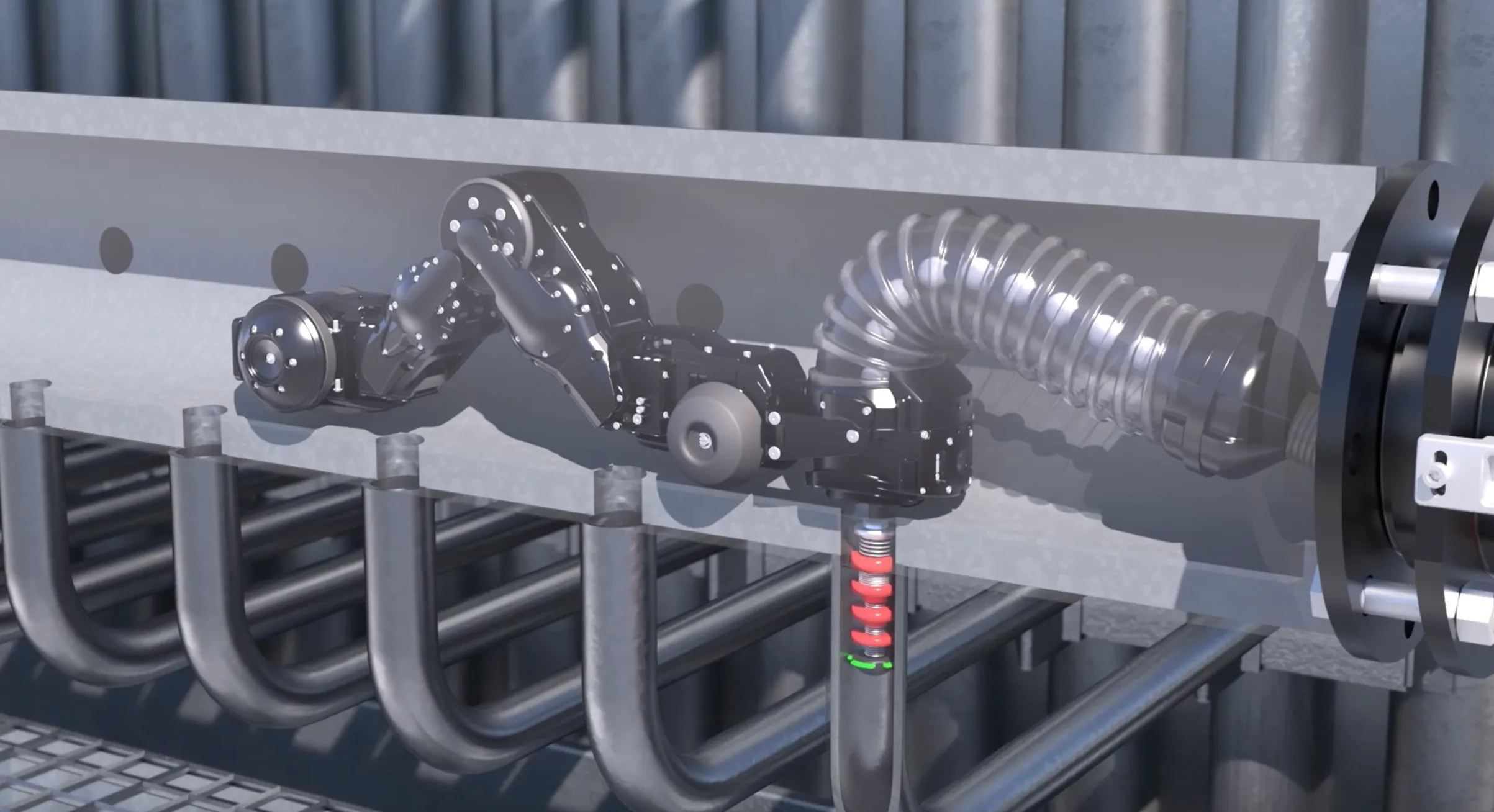
東京工業大学発のベンチャー企業であるhibotは、ロボティクスにより安全で持続可能な世界を実現することを使命としています。hibotのFloat Armは、福島第一原子力発電所の廃炉作業の経験をもとに開発された遠隔操作アームロボットシステムであり、現在ではインフラの点検やメンテナンスのために世界中で展開されています。
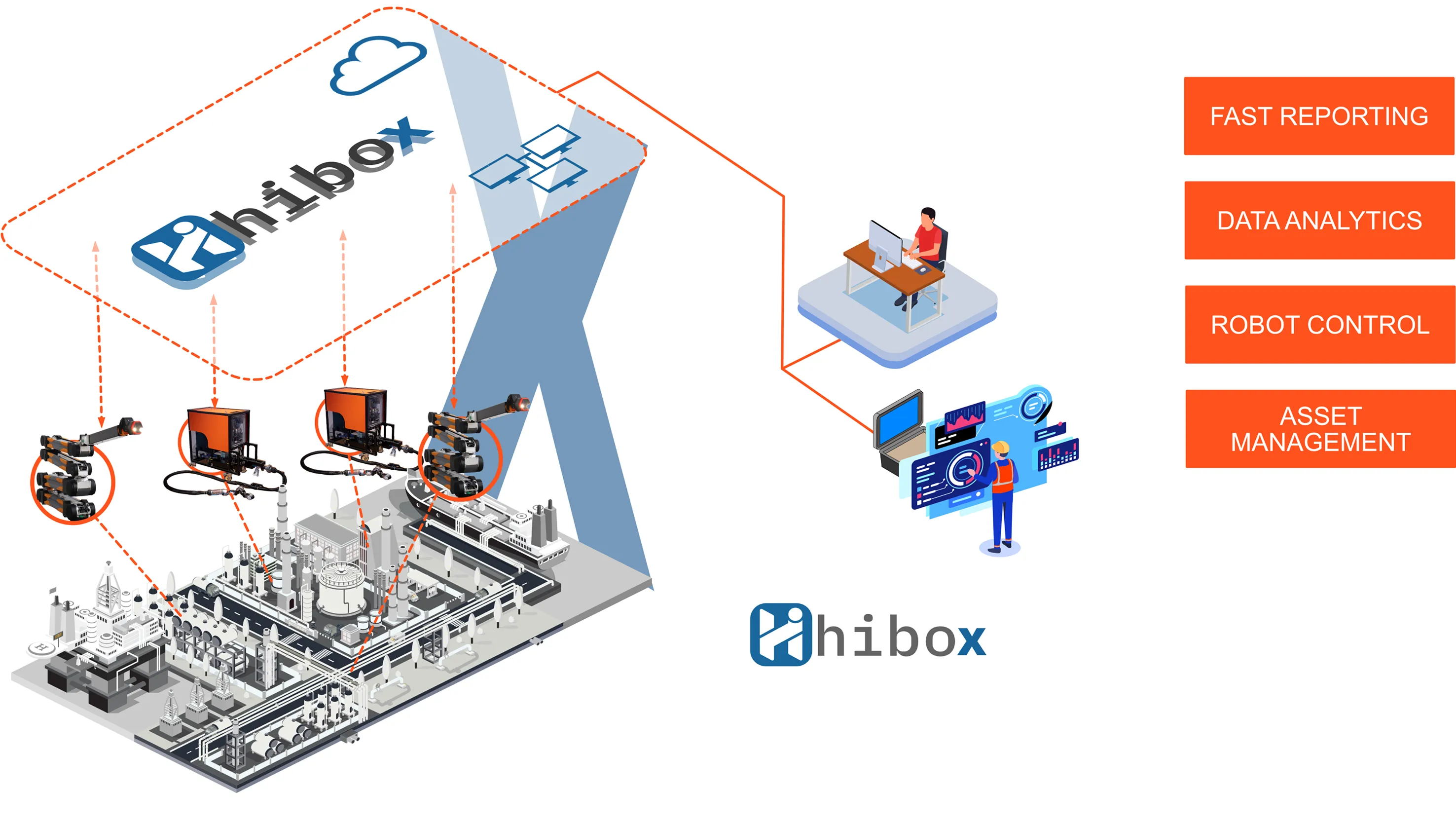
当社のロボットソリューションは、「HiBox」とAIを活用した予測保全システムを組み合わせることで、電力、石油、ガス、化学業界を変革し、次世代のゲームチェンジャーとしてデジタル・トランスフォーメーションをリードします。
5倍以上の効率向上
6
Day
5倍以上の効率向上
通常5~6日間かかる点検作業が、ロボットの導入により1日で可能に」(お客様の声)
ダウンタイムが1日短縮されるだけでも、お客様にとって大きなコストメリットになります。
1
Day
全体的なコスト削減
1
%
全体的なコスト削減
hibotのロボットソリューションを活用することで、コストを最大30%削減できます。
Float Armを使用することで、作業の安全性が向上し、コストも削減されます。足場の使用、効率的な運用、社内承認プロセスが大幅に削減されるか、場合によっては不要になります。
30
%